
ARTS-5025
产品概述
机器人性能检测与校准系统
本系统核心功能严格遵循并满足JJF 2138-2024《工业机器人校准规范》与GB/T 45509-2025《工业机器人动态稳定性试验方法》两大关键标准要求。系统可依据 JJF 2138-2024 对工业机器人的空间精度与结构动力学特征进行全面校准,并支持按照 GB/T 45509-2025 对机器人的动态稳定性关键指标进行检测与量化评估。
在性能测量方面,系统基于激光非接触测量技术,在国内率先实现了对 GB/T 12642-2013《工业机器人性能规范及其试验方法》及 ISO 9283:1998《工业机器人性能标准及相关试验方法》所规定指标的完整测量,能够精确检测并计算机器人运动过程中的六维位姿精度。
此外,本系统还支持对机器人DH模型参数进行校准,以最小代价补偿本体形变与误差,有效提升绝对定位精度,且无需改动机械部件;同时,系统可依据 YY/T 1712-2021、YY/T 1901-2023 对医疗及骨科手术机器人进行测量,并能按照 YY/T 1763-2021 与 YY 9706.264-2022 对质子治疗机等高端设备开展专业检测。

- ARTS-5025 机器人性能检测与校准系统支持六轴关节机器人、码垛机器人、SCARA 机器人、协作机器人、双臂机器人和医疗手术机器人等的性能检测和校准,支持点位规划和 3D 建模仿真,可搭配 I/0 实现测量自动化。
- 对于焊接、装配、打磨、抛光、视觉识别等高精度应用场景,该系统可以显著改善机器人绝对定位精度、空间运行姿态的准确性,保障生产系统运行的可靠和稳定。
- 满足生产企业质检部门用于出厂检验、品质追溯的需要,减少产品返修率,降低生产成本。同时可用于研发部门故障诊断、样机改进,为企业产品改善提供方法和依据 , 从而大幅提升机器人企业技术含量和品牌价值。
校准:连杆长度、减速比、零位精度、耦合比、TCP精度、刚度系数。
测量参数
- 静态特性测试:位姿准确度和位姿重复性、 多方向位姿准确度变动、距离准确度和距离重复性、 位姿特性漂移、互换性、静态柔顺性。
- 动态特性测试:位置稳定时间、位置超调量、轨迹准确度和轨迹重复性、 重复定向轨迹准确度、拐角偏差、轨迹速度特性、 最小定位时间、摆动偏差。
核心功能
- 3D 建模:所有校准模块均支持 3D 模式,兼容 6.0 版本视图的同时,新增 3D 机器人自动生成与第三方模型导入功能。
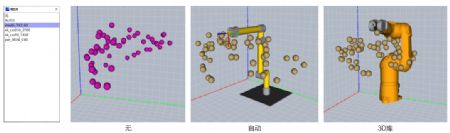
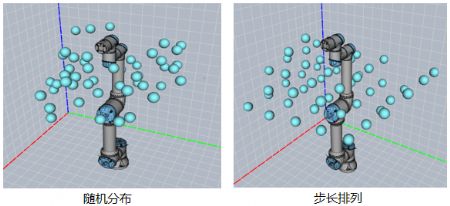
- 点位规划:不同的机器人自动规划相应的测量点位,提供参考姿态与随机自由度,不仅能确保运动过程中不丢光,更是解决了不同操作人员编点的非一致性问题。
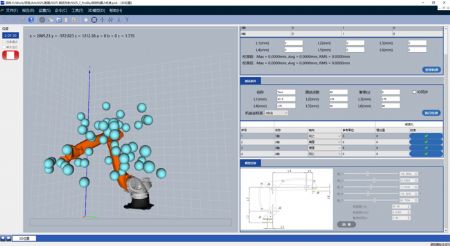
- 3D 仿真:双模式仿真系统
预仿真:提前查看机器人运动轨迹,排查碰撞风险;
测试仿真:同步机器人运动轨迹,实时监测运动位置。
- 工业机器人 性能测量与校准;
- 医疗手术机器人 性能测量与校准;
- 电力作业机器人 性能测量与校准。
.jpg)
直角坐标机器人

SCARA机器人

电力机器人
2.jpg)
关节机器人

码垛机器人

双臂机器人

通用关节机器人

协作机器人

医疗护理机器人